ブログ
GPSロールオーバーとは?

お問い合わせの多い、「GPSロールオーバー」についてまとめました。簡単ですが、GPSのしくみからご説明します。
GPSとは
GPS(グローバル・ポジショニング・システムの略称)はアメリカ合衆国によって運用されている衛星測位システムで、人工衛星から送信されている信号を利用して、自分の位置を測定するシステムです。
GPSの歴史
1973年、アメリカ空軍・海軍が航空機や船舶の位置を正確かつリアルタイムに把握するため開発に着手しました。1989年には人工衛星(GPS衛星)の打ち上げを開始し、1993年に運用が開始されてます。
GPSの仕組み
GPS衛星が送信する信号には、衛星に搭載された原子時計を由来とする極めて正確な時刻情報が含まれています。地上のGPSレシーバーは、複数のGPS衛星から送信された信号と、それを実際に受信した時刻との差を計算することで、GPS衛星までの距離を計算しています。
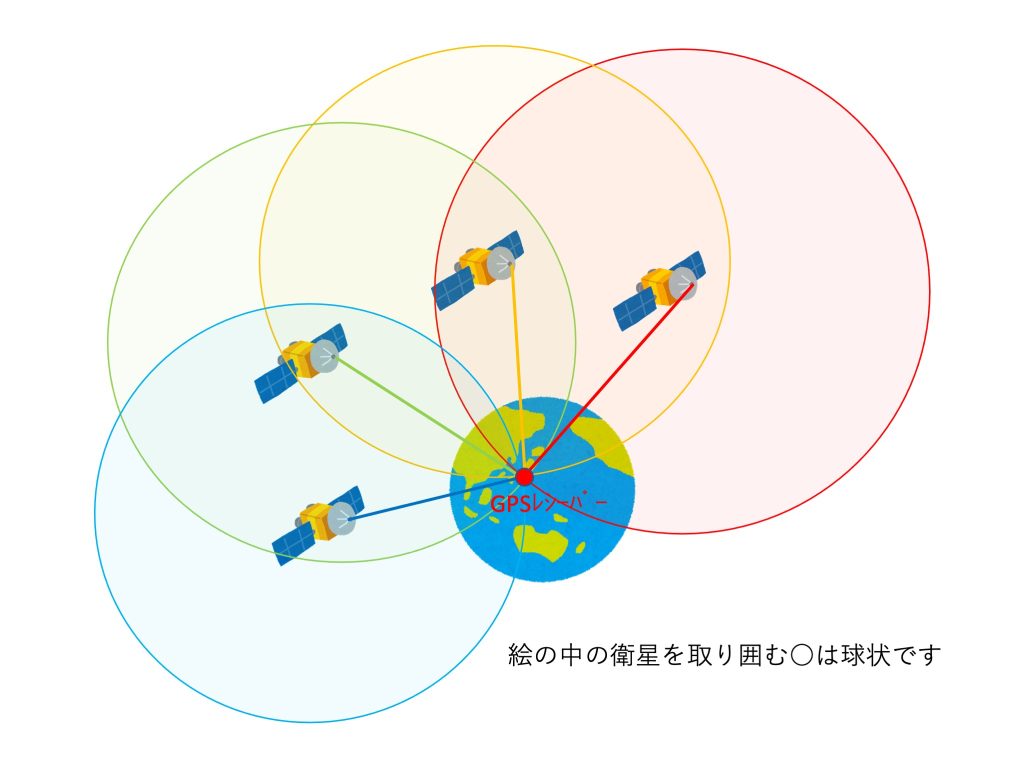
GPSレシーバーは、GPS衛星との距離を使って自身の正確な位置を割り出します。上の絵をご参照ください。
衛星(赤)との距離がわかれば、GPSレシーバーは衛星(赤)を取り囲む球の表面のどこかに位置することになります。衛星(橙)との距離がわかれば、衛星(橙)を取り囲む球の表面のどこかに位置することなります。
こうして、3基のGPS衛星との距離が分かれば、GPSレシーバーは3つの球の交点に位置することになり、自身の位置が確定できます。ただし、実際にはレシーバーが内蔵する時計は正確ではないため、4基目のGPS衛星との距離も使ってズレを補正しています。(位置を確定させるために4つのGPS衛星からの信号を受信する必要があります)
GPSロールオーバーとは?
GPS 衛星からの信号に含まれる時刻情報は、一般的な時刻の表現とは違い、 1980年1月6日午前9時00分00秒(日本時間)を起点として、現在の時刻を、起点から何週目の何秒目という「週」と「秒」だけで表現しています。このうち週については0 から1023 の範囲 (2進数の10bitで表現できる範囲) で表現されており、1023が上限となっています。1980年1月6日からスタートしたGPSの時刻情報は、1024週目(1999年8月22日)には再び0に戻ってしまいました。以降、1024週(19.6年)ごとに0に戻る現象が起こっており、これをGPSロールオーバーと呼んでいます。
GPSロールオーバーに起因する問題
GPSレシーバーは、このGPS信号から得られる週と秒の情報から、現在日時(時刻)への変換を行っています。例えば週番号が「0」だった時は、「1980年1月6日」「1999年8月22日」「2019年4月7日」(すべて日本時間)の可能性がありますが、GPSレシーバーそれぞれが内部に持っているカレンダーのデータと照らし合わせて、現在時刻(日時)に変換しています。
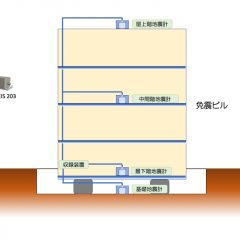
過去に納入した地震観測装置に使用しているGPSレシーバーもこのGPSロールオーバーの影響を受けてしまうため、それを回避する対策を行わないと、誤った日時(だいぶ過去)で地震記録が収録されてしまいます。
(地震観測装置にGPSアンテナが付いているのは、地震を収録した時刻歴を極めて正確にする目的です。(位置を確定させる目的ではありません))
なお、震度演算の結果や、地震波形データそのものの信頼性に影響がでるわけではありません。
GPSロールオーバーに対する当社製地震計の対応
GPSで時刻校正(時刻同期)を行っている当社製 地震収録装置(AccuSEIS(アキュサイス)シリーズ)については、内部に部品を追加することでGPSロールオーバー後もそのまま運用を続けられるような準備がございます。詳しくは当社営業部までお問い合わせください。